4月11日,在智能电动汽车发展高层论坛(2026)上,清华大学教授李克强发表了题为《汽车智能驾驶系统安全挑战与对策》的主旨演讲。李克强教授在系统分析智能网联汽车产业发展现状及问题的基础上,总结出行业发展急需面向差异化应用软件的低代码、可重用、快速迭代计算基础平台及开发系统,并围绕车路云一体化的发展路线及其系统优势,提出车路云一体化功能开发的产业化解决方案,为我国智能网联汽车产业发展提供指引。

Part.01
汽车产业汽车产业已经进入了智能网联时代。智能网联汽车是新一代的移动通信技术、信息技术,包括人工智能在内的信息技术,与实体产业结合的产物,是一个已经引起世界各工业强国战略竞争的高地,包括欧盟、美国、日本,这些国家都颁布了国家层面的产业发展战略,我国也高度重视智能网联汽车产业的发展,将其作为我国推动制造强国、交通强国的重大战略任务之一。
智能网联汽车技术的迅速发展、产业的快速推进,在这个新的情况下,智能网联汽车发展的技术趋势、产业趋势已经发生了重大变化,当然,在不断变化过程中、产业化过程中,实现产业高质量发展的战略路径趋势已经明确。从技术趋势上可以看到,智能化和网联化协同发展,包括基于大模型的汽车人工智能加速应用,包括智能汽车领域需要全域安全技术,要求更加明确。从产业趋势看,产品形态、产业生态、出行模式也在快速发生改变。当然发展战略路径趋势已经很清楚,主要有两个方面:一个方面,人工智能与智能网联汽车深化融合发展,推动我们的产业技术与产业变革;另一个方面,“车路云一体化”将成为实现高级别自动驾驶发展产业的必然路径。
快速发展智能网联汽车产业已经成为全社会的共识。迄今为止,产业发展已经取得了重大进展,包括自动驾驶分级别的,L2级2025年新车装有量已经接近65%,包括4G、5G、C-V2X通信模块也在快速普及。针对高级别自动驾驶相关的关键技术,包括传感器技术、激光雷达、芯片、操作系统。产业生态快速发展,高级别自动驾驶是协同发展,基础设施支撑高级别基础设施也在快速发展,我们国家政府层面推动相关的示范基地、示范测试区域快速建设。
产业快速发展的同时,我国汽车智能化的产业发展到了关键的临界点,在发展过程中要真正做到高质量发展、可持续发展,需要尽快解决面临的一系列挑战性问题,包括:
第一,产业智能化的商业闭环、盈利模式尚不理想。从各家公司的报表可以看到,不甚理想。有以下几点原因:一是安全可靠性不足。自动驾驶首要属性是交通的安全,安全可靠性不能保障,客户是不买单的,安全性可靠性不足也就没有形成盈利的闭环。实际在产品定义上很多方面尚未形成技术闭环,开发的成本高,产业协同也不够,产业企业都在低水平重复,资源也不聚焦。
第二,产品的性能特别是安全性问题尚未被社会完全认可。安全是第一个亟待突破的问题,具体体现在没有很好的商业闭环,或者正在追寻商业闭环的临界点,产品的安全性尚未得到社会客户的认可,包括一些安全隐患,如果从技术来分析,产品定义不准、相关核心技术亟待突破,也要加强法律法规的建设。
从这个角度可以知道,产业进步快速推进的同时安全隐患问题必须解决,现在正在发生的一系列事故会引起社会公众的质疑,安全技术一直是制约大规模商业化的瓶颈,包括去年智驾功能相关的投入比例激增、相关问题产品的召回等。当前,智能驾驶存在的固有技术瓶颈,已经成为威胁道路交通安全和智能驾驶规模化健康发展的重要因素,亟待突破。

通过梳理出现的安全问题可以看出,安全失效的问题主要有以下几个方面:
一是物理的感知极限与多维视角的缺失。平常,人能看见的东西,常规的目标物,由于感知的遮挡、光线的原因,导致智能驾驶系统存在看不清、看错、看漏等问题,以及传感器物理特性导致的感知盲区,这些传感器物理极限是难以通过算法完成的。
二是长尾场景和少见目标识别失效。少数产品当中,仍然存在智能驾驶由于缺少提前训练、训练场景不足,出现罕见场景无法识别的问题。
三是逻辑决策瓶颈与接管机制失效。逻辑决策瓶颈与接管机制尚需要突破,比如突发难以接管的场景中,由于出现突然的障碍物等,造成无法提前预判,事故风险显著增加。
四是车企算法研发的数据孤岛效应。从开发层面来看,花了大量投入,特别是从传统的制造业、汽车企业来看,大量的投入做数据闭环,各个企业后续数据的收集、数据训练在平台上存在一系列问题,包括单车数据有限、车载传感物理的限制、不同车机采集数据类型的不一致,各家独立,无法共享,包括数据安全保障机制等,都限制了开发。
针对上述安全问题,从技术上概括为:一是单车感知能力受限;二是端到端模型可靠性差,哪怕大家提到的AI大模型训练数据,尚不全面;三是现在的产品架构,都是烟囱型架构,缺乏基础底座,会造成开发成本高、开发质量和效率低,所以急需面向差异化应用的低代码、可重复快速迭代的计算机平台及开发系统。
Part.02
智能网联汽车安全保障一定要有新范式出现,新范式分为几个部分:感知维度方面,从“视觉内平视”到 “超视觉的全感知”;决策逻辑方面,从“独立博弈”到“协同最优”;安全防线方面,要从“被动防御”到“内生安全”;产业生态方面,不仅仅从“造车竞争”到“生态共建”,也要按这样的思路推进系统的安全性能提升。
围绕这样的体系架构,关于未来汽车的发展、技术的发展,现在谈的单车协同,已经没有传统意义上的单车智能,任何车都有通信,任何车的发展,从传统的单车智能到现在各家云端的协同、车车协同到“车路云一体化”协同发展的最理想的发展状态,只有通过技术整体架构设计,才能真正意义上做到解决上述的安全问题。

按照这样的架构设置,对解决当前造成的安全问题会有系统性的解决方案。车路云一体化系统具有多项核心优势:
一是为智能汽车行驶建立了安全的“数字轨道”。自由开车和在轨道上开车的要求不一样,左图看到单车智能,去年有一家媒体做试验,没有哪一家企业的自动驾驶能系统在这样的车速下在前面突然躲闪后避免与头车碰撞。如果有了数字轨道,能够真正意义上做到提前感知,规避风险。
二是为AI大模型训练建立了提升安全的“数字发电站”。现在全社会自动驾驶在开发的变革里提到AI大模型,AI有三要素,AI的数据也有三要素,即准确性、海量性、完备性。现在各家企业单独收集的数据,在国内数据即使多也不全,数据多和全是两个维度,有了车路云一体化这套系统以后,通过上帝的视角,再加上各个车的数据汇聚,再变化回车端训练,这样才能够真正做到提升安全的“数字发电站”。
三是CBDES是高质量算法开发的“基础底座”。针对现在的烟囱型架构,只有“分层解耦、跨域共用”的方式,可以用低代码快速开发提高效率的模式,智能网联汽车国家创新中心形成全行业共识,在国家相关项目的支持下,推动“车路云一体化”系统的发展,能够在本质上把安全问题给予解决。
围绕这个架构,国家四部委、五部委,工信部、公安部、交通部等部委,推动两个大的示范,一个是高级别L3级的城市准入和城市准入示范,另外一个是要达到高级别自动驾驶需要基础设施支撑的“车路云一体化”示范,现在正在推动这两个重大的示范项目。
Part.03
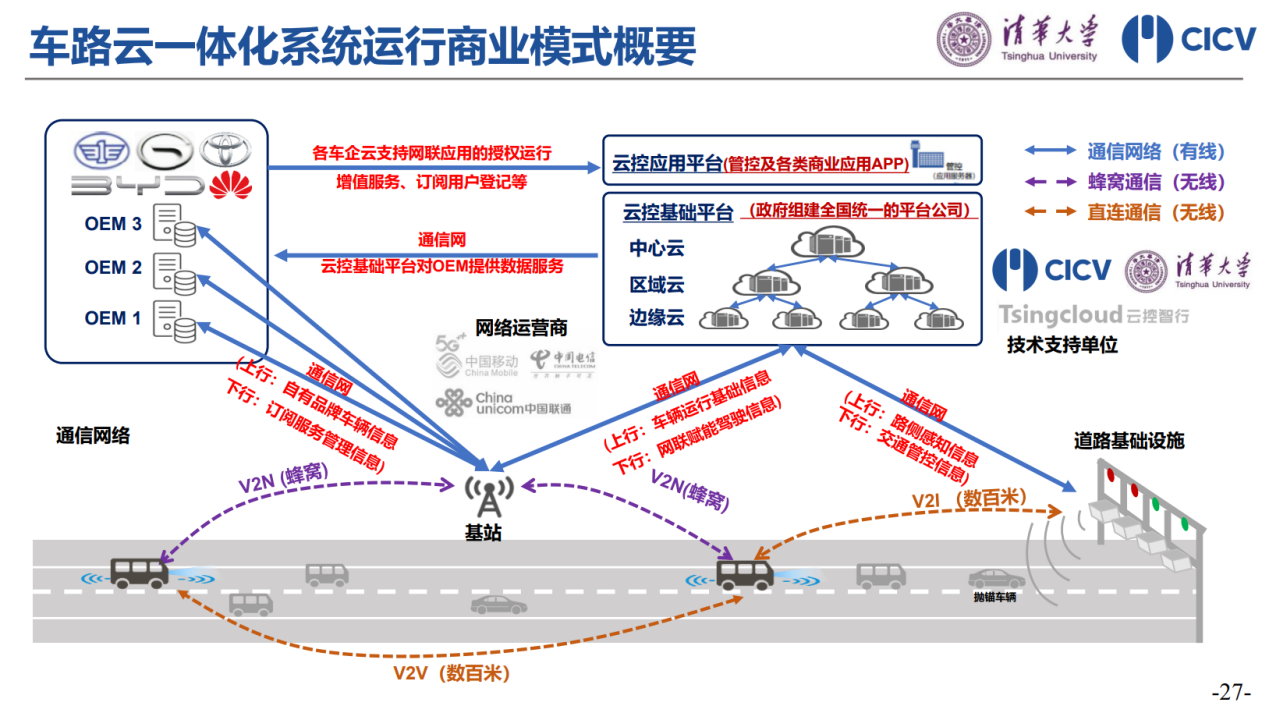
2025年已经发起了中外15家车企联合在“车路云一体化”系统架构下开展了示范。15家车企包括中国的主流车企,中国的3家央企,包括上汽、广汽、比亚迪,当然也包括丰田、华为等,几家车企和相关企业联合参加这样的行动,来推动产业化示范相关场景,是否能解决前面提到的几大场景的问题。架构有完全可行的商业模式,下图左上角是各家的数据平台,现在有了路侧单元,有通信、标准以后,既能跟自己家的数据单元打通,更重要的是汇聚到路侧单元的边缘云、区域云、中心云的三级技术平台,形成可以自主支撑的闭环,来解决上述的几大关键问题。
示范是根据车企提出的17个应用场景,其中5个是去年媒体公布的都过不了关的几个场景,包括网联式前向避碰辅助、网联式滤波车速引导、网联式匝道汇入/汇出、鬼探头、网联式导航辅助驾驶场景,这几家车企都用产业化车型平台,去年这个实验做完以后,今年正在做量产化推进。
针对“车路云一体化”系统架构现存的问题,也是大家都在讲的自动驾驶的难以突破、难以做商业闭环的几个问题:
一是网联式前向避撞辅助。我们在长春、北京、重庆都安装这样的产品推动。
二是网联式绿波车速引导。运气好的时候,一路遇到绿灯,现在用导航去做,很难。系统做好以后,在北京、重庆能连续通过5个以上的红绿灯路口,这是当前成本最低、普及范围最广,现在都在作为产业化的场景。
三是网联式匝道汇入/汇出。国外车企认为这是最令人感兴趣的、也是最容易出事故的,三个车,后面车减速、前面车加速,无缝合并,这对安全、效率来说也是场景的刚需。
四是有遮挡的VRU安全辅助。现在遇到“鬼探头”的情况,用到“车路云一体化”系统以后怎么做到安全通过,这样的试验也在推进。
这样一系列示范,去年在北京的WSCV世界智能网联汽车大会,包括去年在重庆的中国汽车工程年会上都做了完整的示范、产业化应用示范,示范以后得到非常好的结论,这是一个可行的没有成本增加且能够显著降低安全风险的技术。
Part.04
首先,安全依然是行业亟待解决的首要问题,应当正视单车智能驾驶技术瓶颈是解决问题的首要前提,行业需摒弃急功近利的噱头,时刻敬畏技术局限,回归安全本源,以系统工程思维,多维并举,筑牢智能驾驶技术守护生命的价值基础。
其次,“车路云一体化”系统为车辆提供多维数据输入。实现车、路、全域协同感知,增强环境感知与风险预判能力,为智能驾驶汽车建立“数字轨道”,提升智能网联汽车驾驶安全性与通行效率,支撑智能交通高效稳定运行。
然后,“车路云一体化”系统的数据兼具“海量性”与“完备性”。融合车辆自主上报、路侧感知与交通指挥信号、交通事件等全维度数据获取模式,打破数据孤岛,为AI大模型训练建立提升安全的“数字发电站”,在保障智能驾驶安全的同时,降低模型训练成本,提升训练效率。
最后,计算基础平台和开发系统提升产品安全研发质量和效率。通过拆解复杂应用软件建立起来的功能组件库,实现分层解耦、跨域共用,提高模块复用率,并通过图形化工具实现低代码开发,降低开发难度和成本,支撑“车路云一体化”智能驾驶产品的安全高效开发。
当前,智能驾驶已进入规模化应用攻坚阶段。既要充分认识单车智能存在的技术局限,牢牢守住安全底线,也要坚定不移推进网联协同技术路线,坚决摒弃急功近利的发展模式。加快构建功能稳定可靠、覆盖范围更广的协同感知环境,为系统建设提供多维度、海量高质量训练数据,支撑智能驾驶产品安全高效研发应用,推动智能网联汽车在交通出行服务与城市综合治理实现深度融合应用。